Inbetriebnahme
Ein großer Vorteil des RoboUP T1200 Pro ist der Verzicht auf das Begrenzungskabel, womit man sich je nach Garten einige Stunden Arbeit spart. Im beiliegenden Benutzerhandbuch ist der Aufbau und die Inbetriebnahme beschrieben. Dies wird in der Praxis aber nicht benötigt, da die RoboUP-App alle notwendigen Schritte vom Aufbau der Station bis zum ersten Mähen in Bild und Text erklärt.
Die App ist für Android und Apple verfügbar und lässt sich direkt via Google Play Store bzw. Apple App Store installieren.
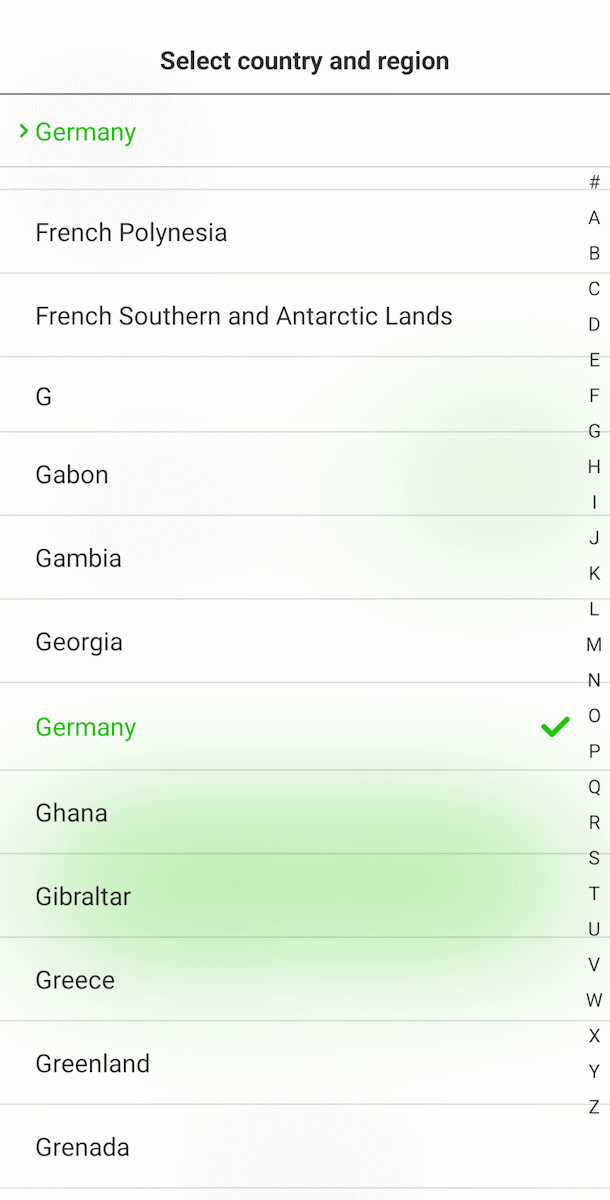
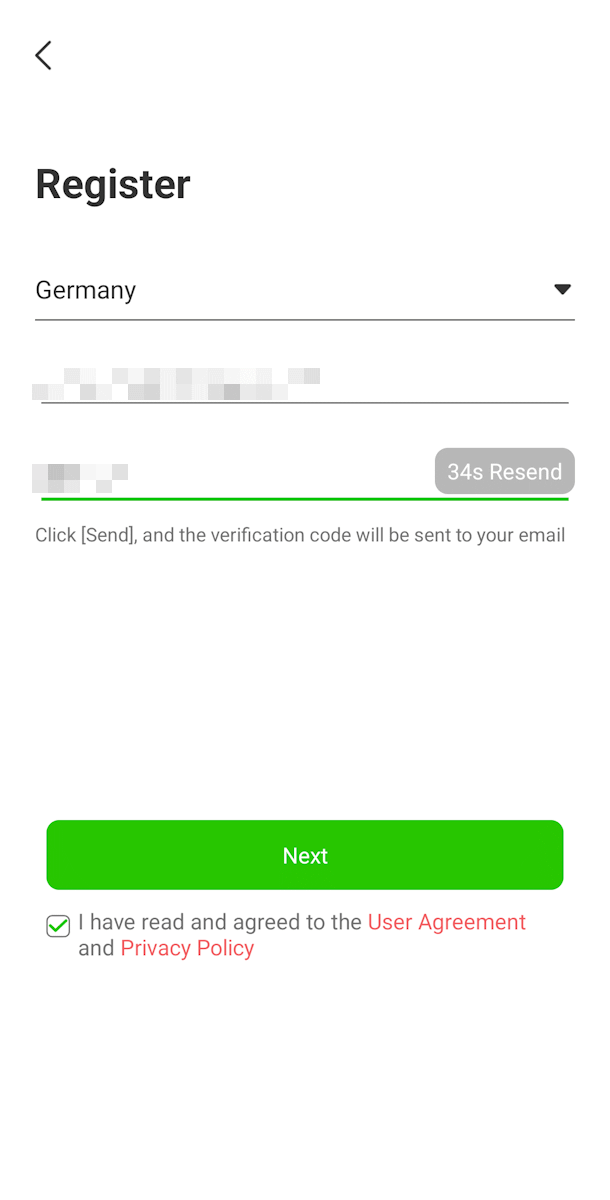
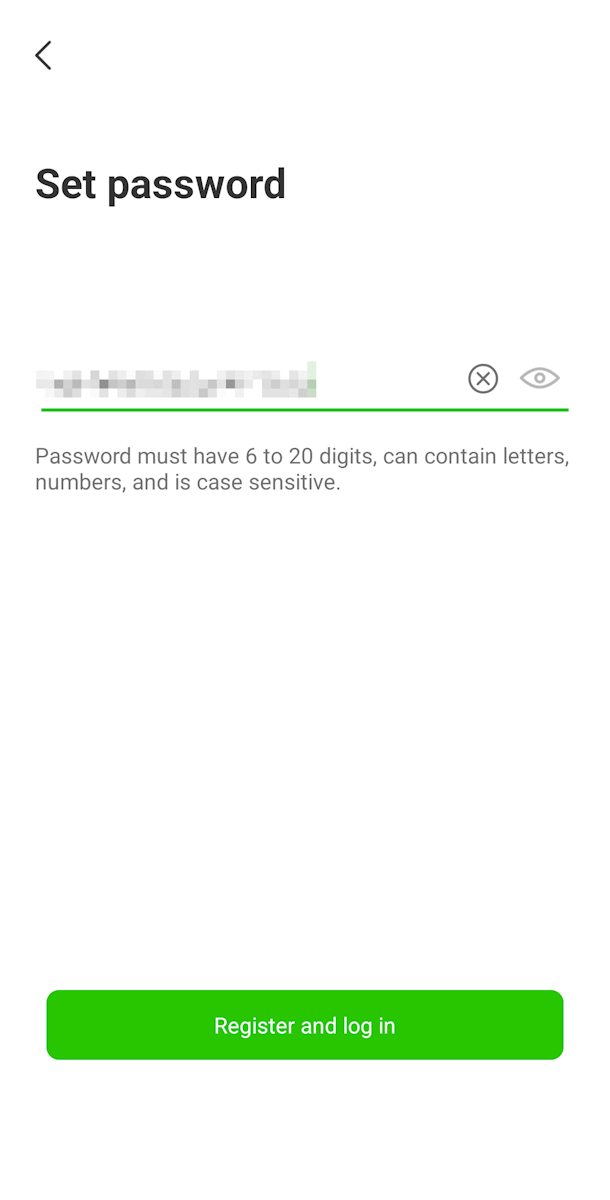
Beim ersten Start der App muss zuerst das Land angegeben werden. Anschließend wird eine E-Mail-Adresse benötigt, an welche ein Einmalpasswort zur Verifikation gesendet wird. Im nächsten Schritt kann ein Passwort vergeben werden. Jetzt kann der Mähroboter hinzugefügt werden.
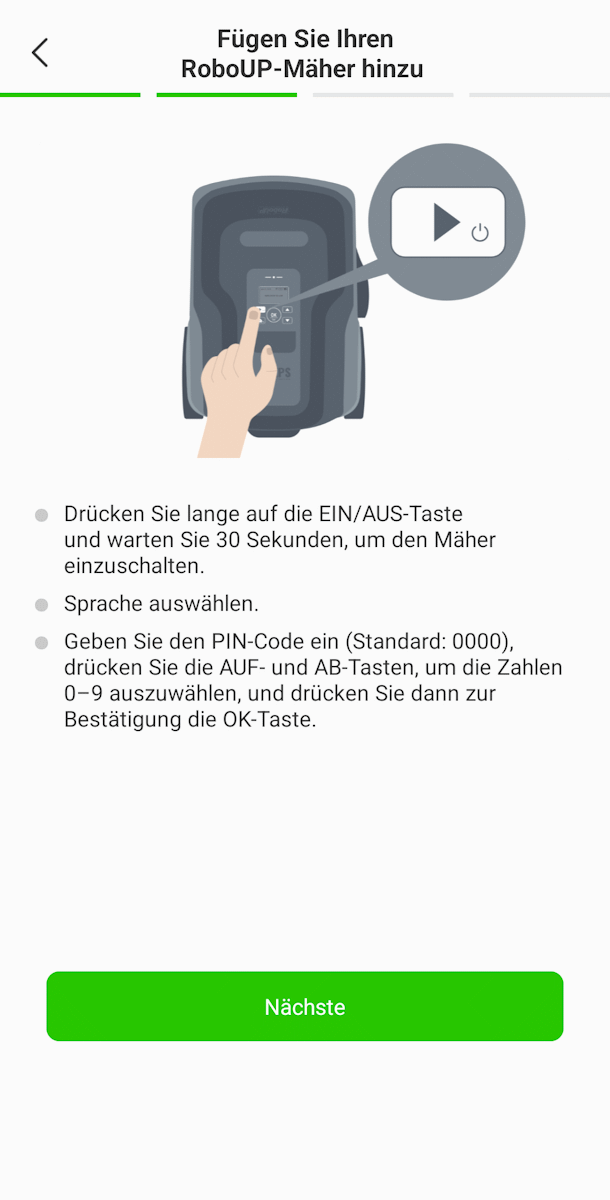
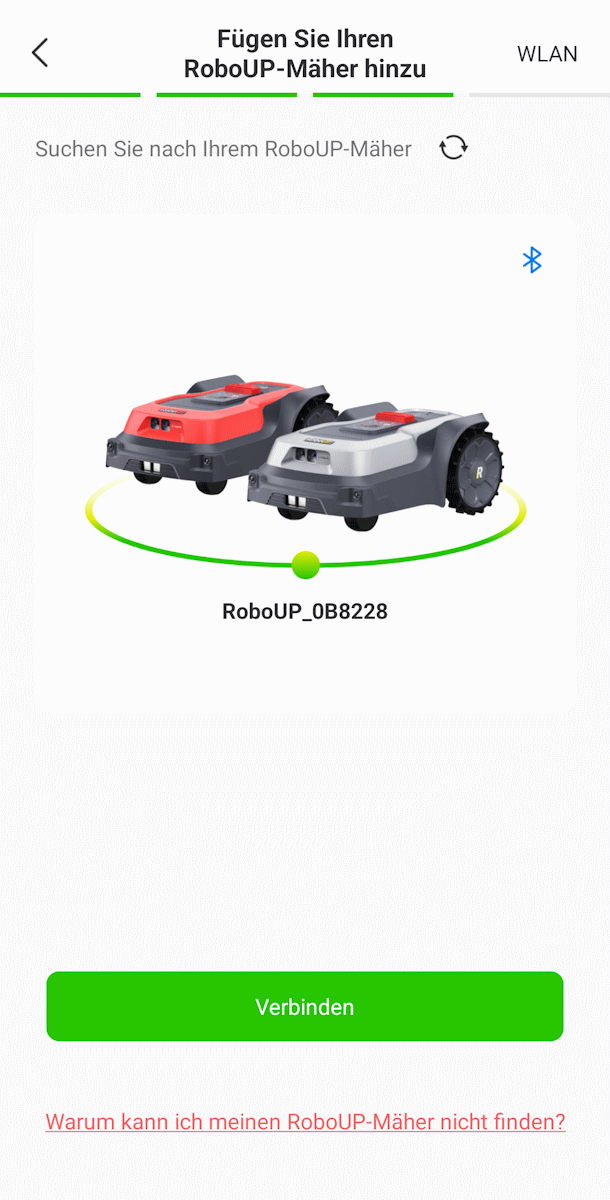
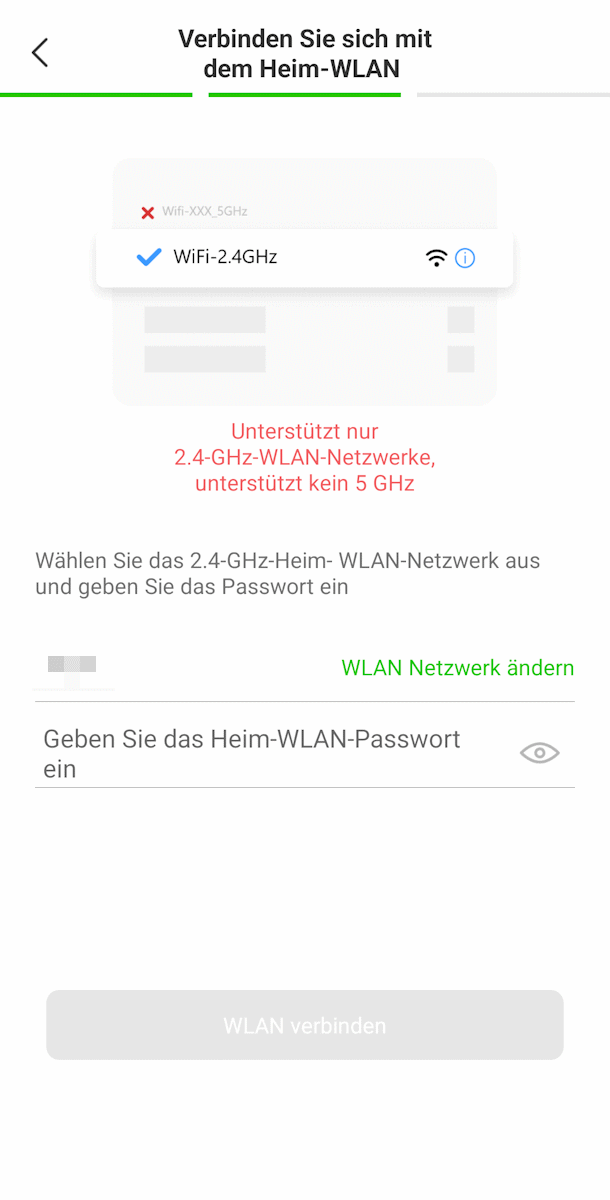
Anschließend folgt eine genaue Beschreibung, wie der RoboUp T1200 Pro via Bluetooth verbunden werden kann. Sobald das erfolgreich war, wird der Roboter noch mit dem WLAN verbunden. Auch dies war problemlos möglich, erfordert aber einen zumindest mittelmäßigen WLAN-Empfang.
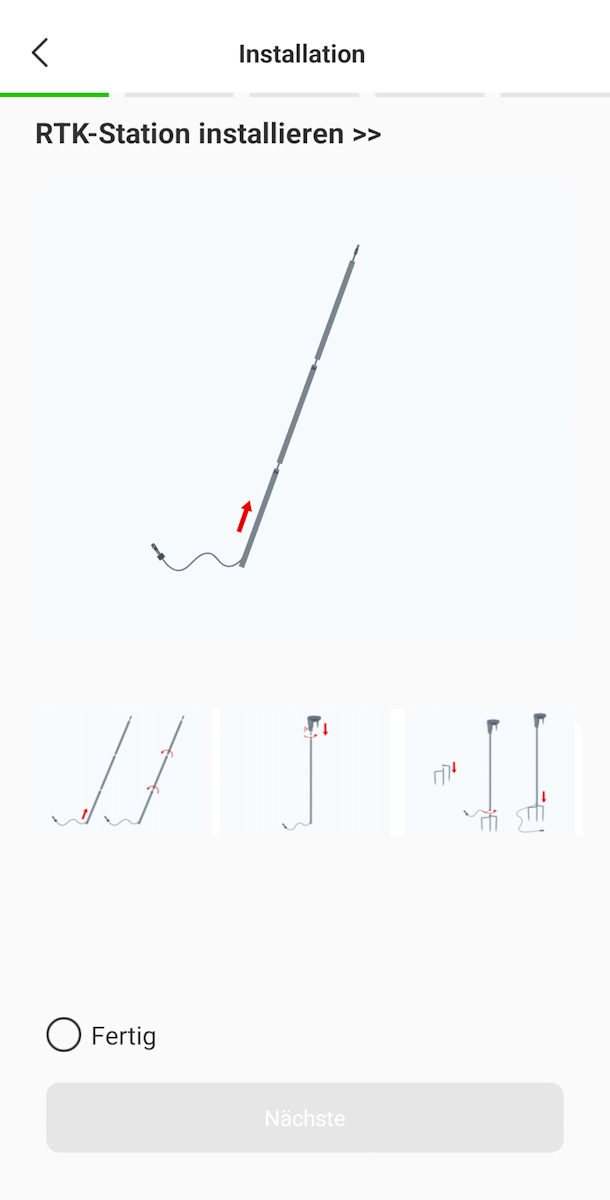
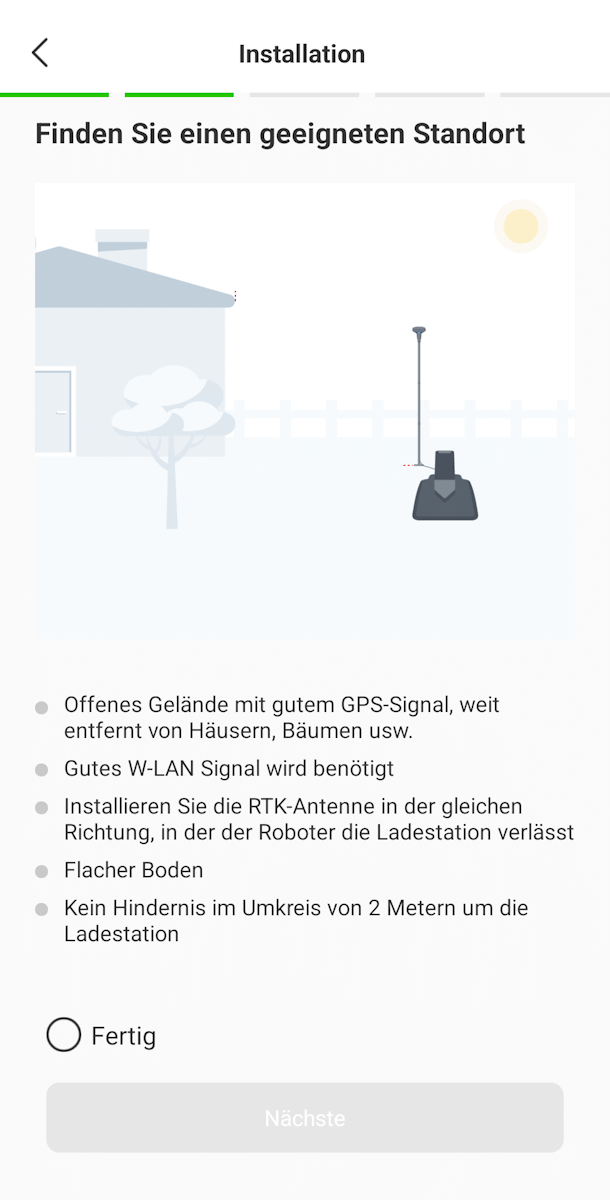
Jetzt geht es mit dem Aufbau der RTK-Antenne weiter. Bei der Platzierung sollte darauf geachtet werden, dass die Antenne eine freie Sicht zum Himmel hat und sich keine Gebäude oder Bäume in der Nähe befinden. Außerdem wird ein gutes WLAN-Signal gefordert. Je nach Garten ist es nicht so leicht, eine geeignete Stelle zu finden, die alle Kriterien erfüllt. Durch das mitgelieferte 10-m-Verlängerungskabel muss die RTK-Antenne aber nicht neben der Ladestation stehen und kann problemlos an einer anderen Stelle montiert werden.
Ich habe mich beim ersten Test für einen provisorischen Aufbau vor dem Hochbeet entschieden.
-

- RoboUP T1200 Pro – Ladestation Montage
-

- RoboUP T1200 Pro – Ladestation Montage

-

- RoboUP T1200 Pro – Ladestation Montage

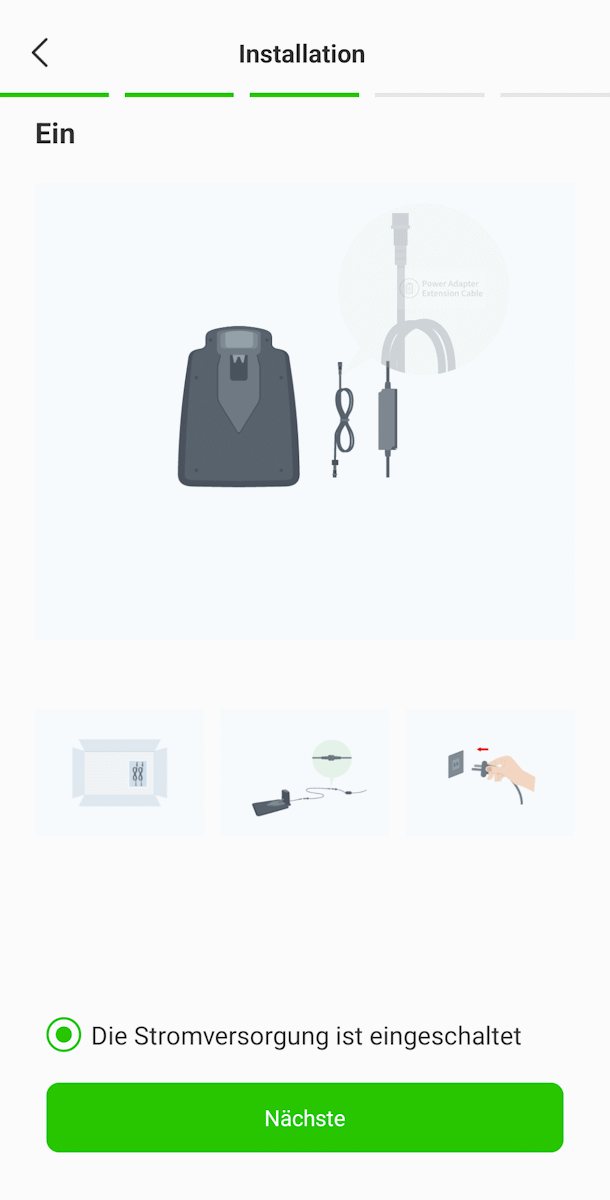
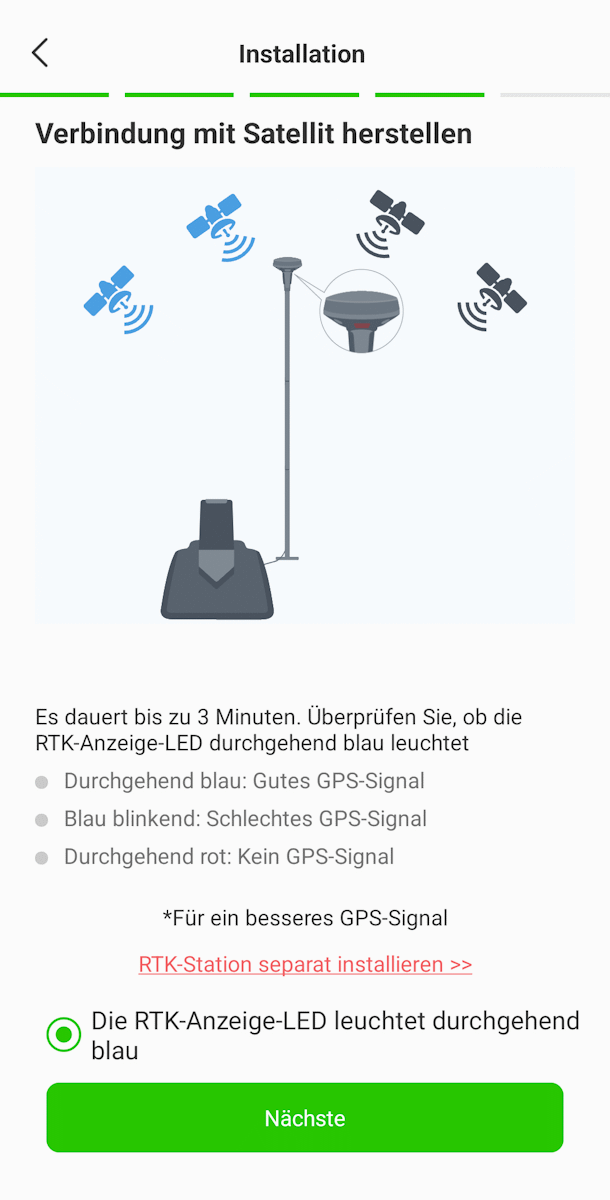
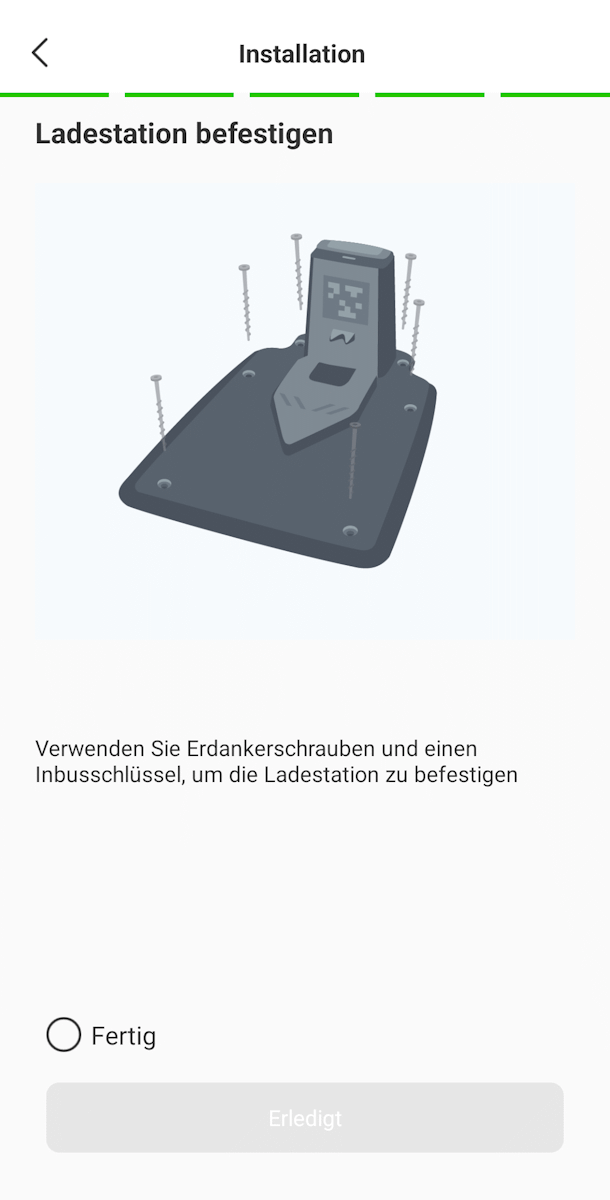
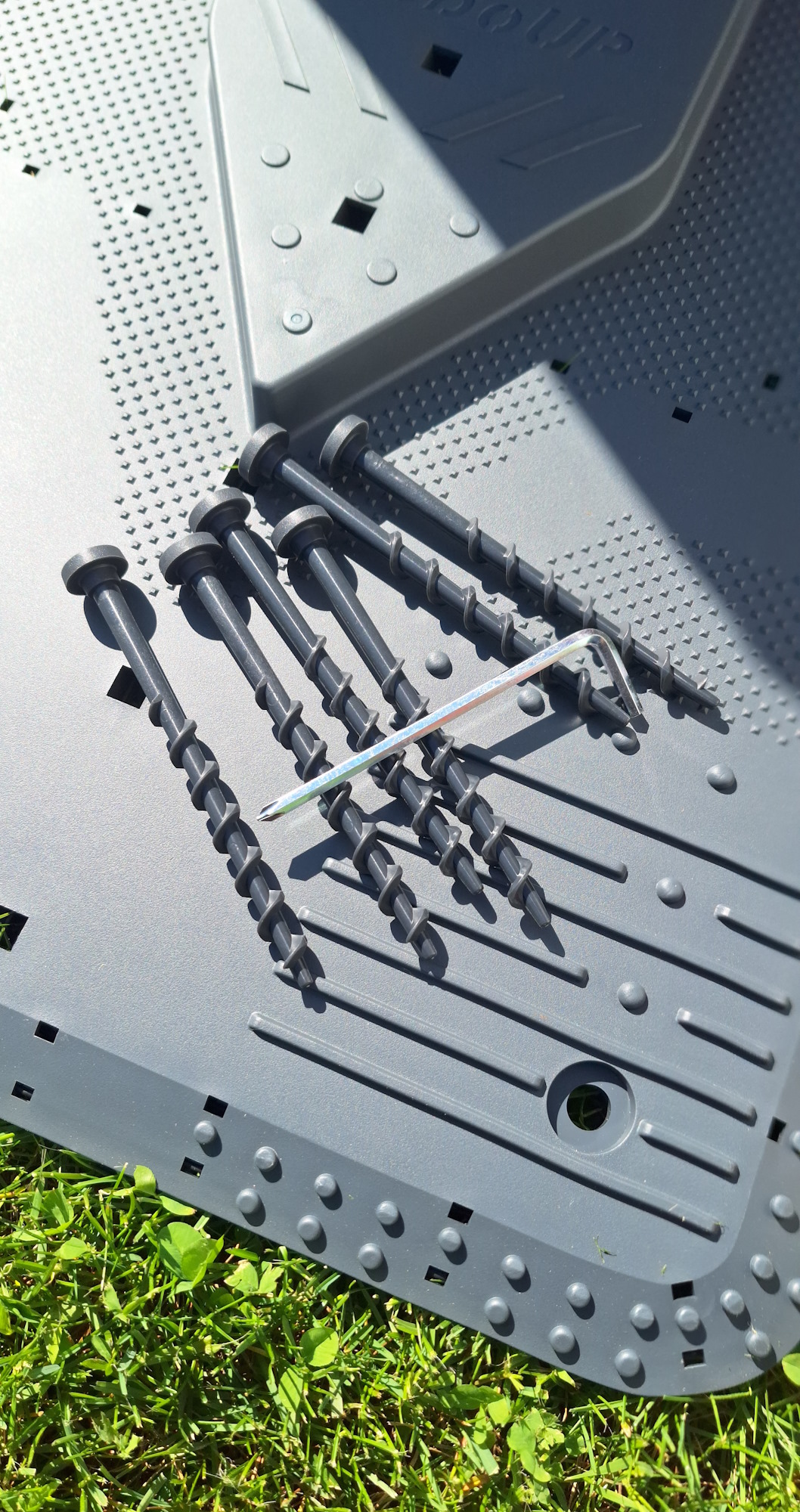
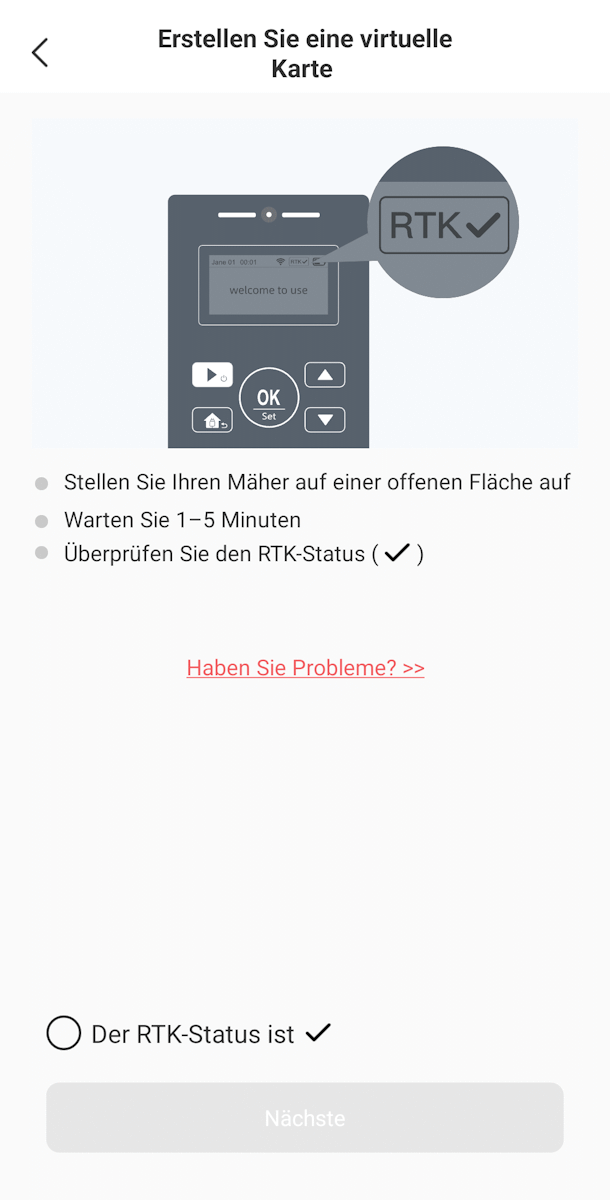
Anschließend wird die Antenne mit der Ladestation verbunden und diese mit Strom versorgt. Nach ein paar Minuten sieht man anhand der LED, ob ein GPS-Signal anliegt und wie gut die Qualität des Signals ist. Zum Schluss kann die Ladestation mit ein paar Schrauben in der Erde verankert werden.
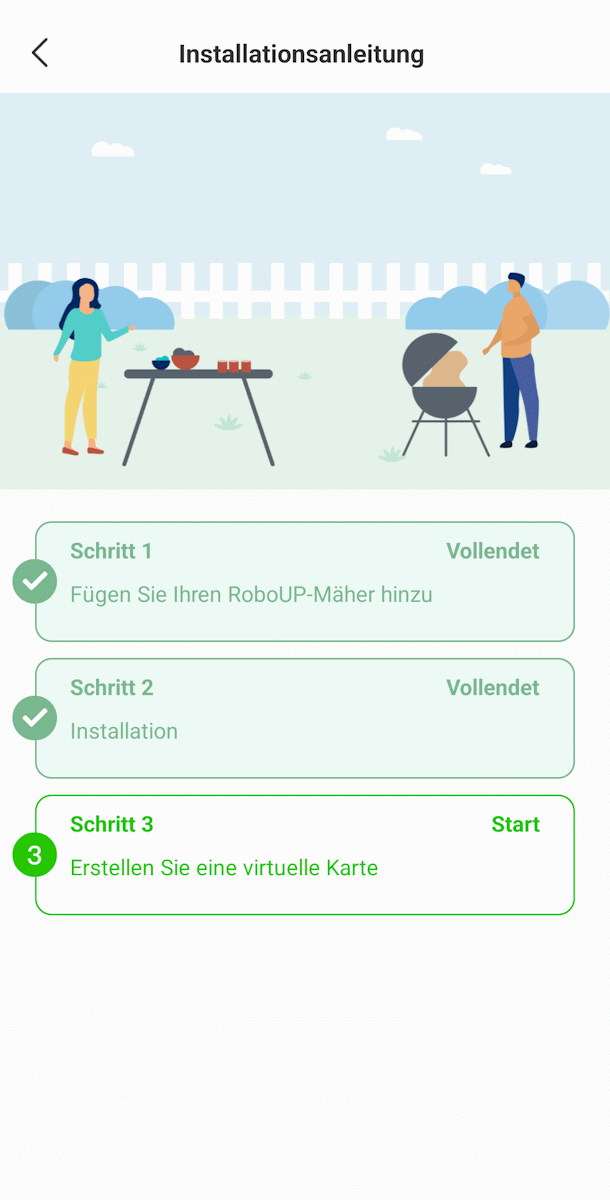
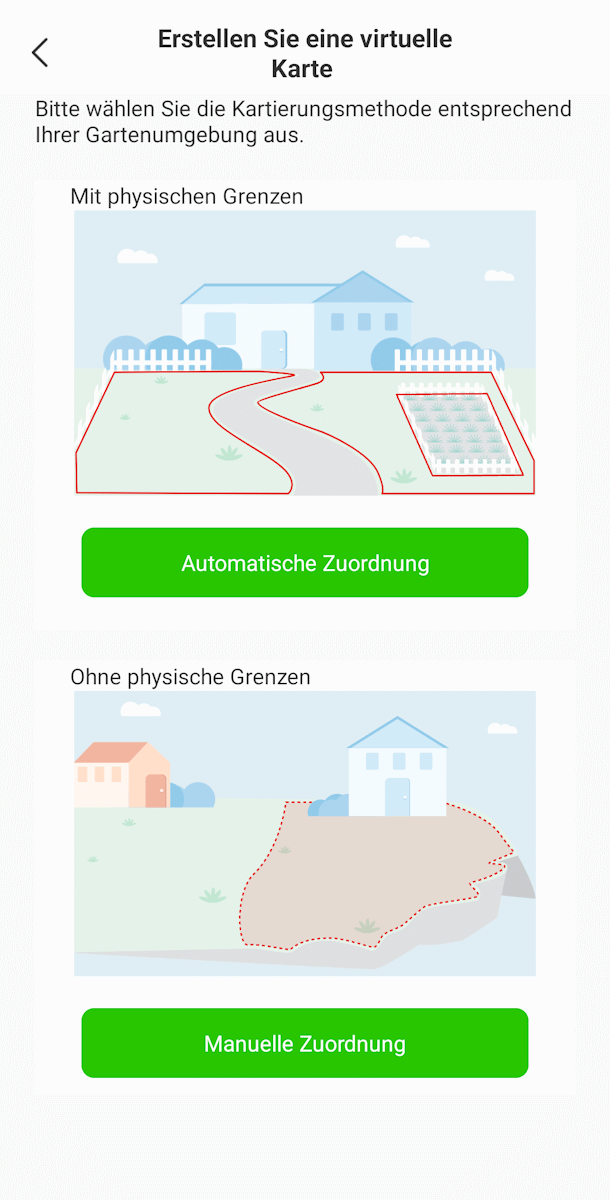
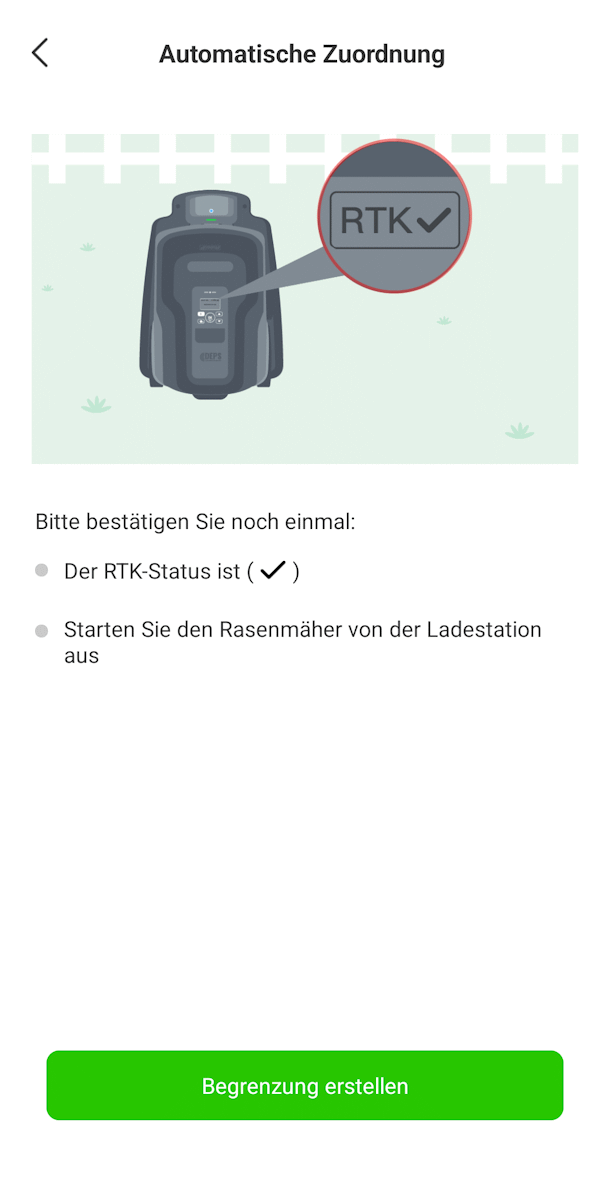
Der Aufbau ist somit erledigt. Vor dem ersten Mähen muss wie bei einem Saugroboter eine Karte des Gartens erstellt werden. Hier kann zwischen einer manuellen oder einer automatischen Kartierung entschieden werden.
-

- RoboUP T1200 Pro – automatische Kartierung

-

- RoboUP T1200 Pro – automatische Kartierung

-

- RoboUP T1200 Pro – manuelle Kartierung

Im ersten Versuch testen wir die automatische Kartierung. Hierfür müssen entweder physische Begrenzungen (z.B. Zäune oder Mauern) oder visuelle Begrenzungen (z.B. Terrasse, Pflastersteine) des Rasens existieren. Der Großteil des zu mähenden Bereichs ist auf einer Seite mit einer Mauer begrenzt und auf der anderen durch Pflastersteine. An den offenen Seiten wurde eine Begrenzung mit Brettern realisiert.
Der Mähroboter ist im Test die Rasenfläche abgefahren und konnte auch die visuellen Grenzen gut erfassen. Leider schlug das Erstellen der Karte in den ersten zwei Versuchen fehl. Die Fehlerursache war nicht ganz klar. Allerdings tippen wir auf ein Softwareproblem beim Erstellen der Karte, da es während der Grenzerfassung keine Probleme gab. Erst im dritten Anlauf wurde die Karte erfolgreich erstellt.
Bei einer komplexen Rasenfläche wird eine manuelle Kartierung empfohlen. Hier wird der T1200 Pro über das Handy wie ein ferngesteuertes Auto an den Rasenkanten entlang gesteuert. Hierbei sollte ein Abstand von ca. 15 Zentimetern eingehalten werden. Zur Hilfe liegt eine entsprechende Markierung im Karton, die bei Bedarf auf dem Roboter befestigt werden kann. Das Anlegen der Karte mit der manuellen Methode hat ohne Probleme funktioniert, auch wenn die Steuerung des Roboters über das Smartphone an einigen Stellen etwas hakelig sein kann. Erwähnt werden muss noch, dass für die manuelle Kartierung eine Bluetooth-Verbindung zwingend notwendig ist.



Der sieht ganz interessant aus. Danke für die Review 🙂